



- Product Details
- {{item.text}}
Quick Details
-
Type:
-
Cube
-
Product name:
-
CUAV Pixhawk V5 plus
-
MOQ:
-
1pcs
-
Compatible brand:
-
PX4 / Ardupilot
-
Weight:
-
90g
-
Dimensions:
-
85.5 X 42 X 33mm
-
Operating temperature:
-
-20 ~ 80°C
-
Output:
-
8-14 PWM
-
IO processor:
-
STM32F100
-
Power:
-
4.3~5.4V
-
USB input:
-
4.75~5.25V
Quick Details
-
Place of Origin:
-
Guangdong, China
-
Brand Name:
-
CUAV
-
Model Number:
-
V5+
-
Type:
-
Cube
-
Product name:
-
CUAV Pixhawk V5 plus
-
MOQ:
-
1pcs
-
Compatible brand:
-
PX4 / Ardupilot
-
Weight:
-
90g
-
Dimensions:
-
85.5 X 42 X 33mm
-
Operating temperature:
-
-20 ~ 80°C
-
Output:
-
8-14 PWM
-
IO processor:
-
STM32F100
-
Power:
-
4.3~5.4V
-
USB input:
-
4.75~5.25V
Recommend Products
Product Parameters
|
Compatible Brand
|
PX4 / Ardupilot
|
|
Weight
|
90g
|
|
Dimension
|
85.5x42x33mm
|
|
Operating temperature
|
-20 ~ 80°C
|
|
Outputs
|
8-14 PWM
|
|
Memory
|
2MB
|
|
RAM
|
512KB
|
|
IO Processor
|
STM32F100
|
|
Accelerometer/Gyroscope
|
ICM-20689
|
|
Main FMU Processor
|
STM32F765
|
|
IO Processor
|
STM32F100
|
|
Accelerometer/Gyroscope
|
ICM-20689
|
|
Accelerometer/Gyroscope
|
BMI055
|
|
Magnetometer
|
IST8310
|
|
Barometer
|
MS5611
|
|
8-14 PWM outputs
|
(6 from IO, 8 from FMU)
|
|
servo output
|
S.Bus
|
|
serial ports
|
5 general purpose
|
|
ports
|
4 I2C
|
|
buses
|
4 SPI
|
|
Analog inputs for voltage
|
current of 2 batteries
|
|
Power
|
4.3~5.4V
|
|
USB Input
|
4.75~5.25V
|
|
Servo Rail Input
|
0~36V
|
Details Images


Products Description
CUAV V5+ Autopilot
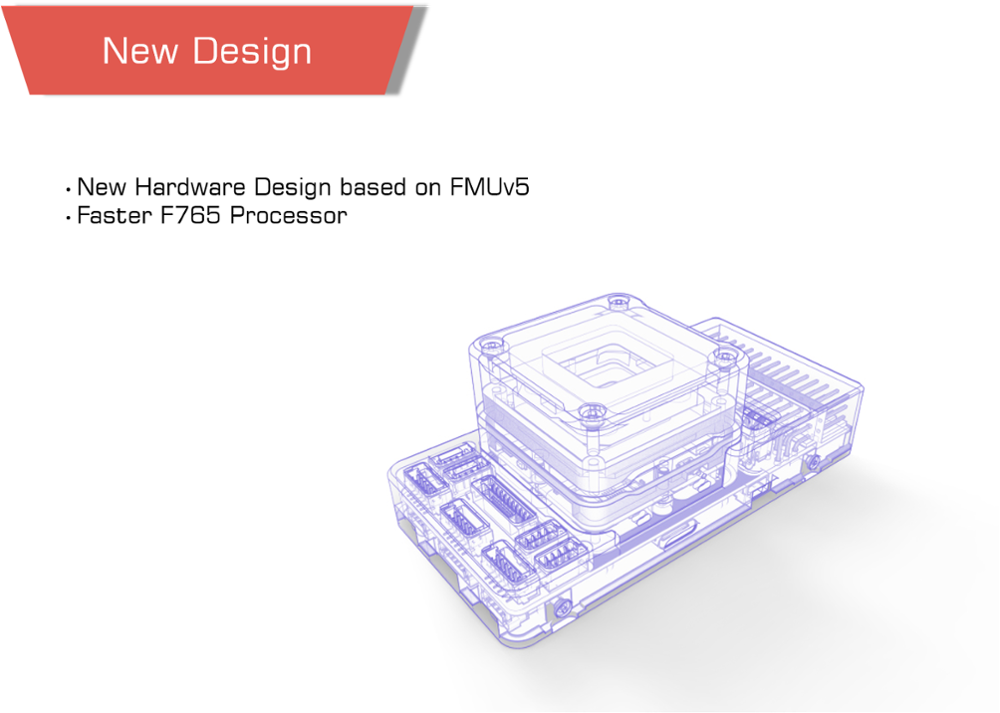
* New Hardware Design based on FMUv5
* Faster F765 Processor
The V5+ AutoPilot is an advanced autopilot for academic and commercial integrators. Designed by CUAV in collaboration with the PX4
team. Based on the Pixhawk FMUv5 open hardware design, a highly modular board using Pixhawk standard pinouts for its external
interface, allowing for carrier board integration. Out of the box pre-installed with PX4 Open Source Autopilot, and fully
supported by ArduPilot.
* New Hardware Design based on FMUv5
* Faster F765 Processor
The V5+ AutoPilot is an advanced autopilot for academic and commercial integrators. Designed by CUAV in collaboration with the PX4
team. Based on the Pixhawk FMUv5 open hardware design, a highly modular board using Pixhawk standard pinouts for its external
interface, allowing for carrier board integration. Out of the box pre-installed with PX4 Open Source Autopilot, and fully
supported by ArduPilot.
Company Introduction
MotioNew is your place to find innovation, latest technology, and cool ideas. You can ignite your Newest Motions starting here.
We are a group of experts who you can consult for your next Motion in design and engineering of your next project. Whether it is a professional job or a DIY, we are here to support you.
In all situations, we are here to support you, in all stages of your project, starting from helping you to design your system, extending to buying the parts, packing them, and than shipping them to you, and beyond that to after sale services.








Hot Searches
