


Infrared remote control system is generally divided into two parts: transmitting and receiving
- Product Details
- {{item.text}}
Quick Details
-
Place of Origin:
-
Guangdong, China
-
button:
-
3
Quick Details
-
Function:
-
Automatic
-
Brand Name:
-
Taidacent
-
Model Number:
-
TD3KEYUPD6122
-
Place of Origin:
-
Guangdong, China
-
button:
-
3
Taidacent 3/4 Keys 38K Universal Infared Remote Controller Custom Remote Control UPD6122 Programmable IR 3 Button Remote
Product Description
The remote control adopts the UPD6122 control chip NEC coding format, user code and key value, please download the data to view, frequency 38K, size 86*40*7mm, standard transmission distance of 8 meters, CR2025 battery power supply, button force 200-350g, normal button life More than 200,000 times.
Specification
Ambient temperature -20°C~45°C
Relative humidity 45%~75%RH
Atmospheric pressure 86.~106Kpa
Ambient illuminance (used) natural light or fluorescent light 200±5OLX
Ambient temperature
Relative humidity 45%~75% RH
Atmospheric pressure 86~106Kpa
Ambient illuminance (use) natural light or fluorescent light 200 ± 5OLX
Chrome plate material PET with bulge
Plastic material ABS/new material is harmless to human body
Button material: PE PVC carbon film contacts.)
Circuit board material 94HB-. 0..8./mm
Please refer to the code table description on the attached page for the processor model
Packing method: self-adhesive bag
IC packaging method Dip Chip: CD6222B
Remote control emission source IR..(940±50nm)
See the attached picture for the remote control transmitting code table.....
Remote control coding specification NEC coding method
Product size 86*40*6.0mm.
Use battery type lithium manganese dioxide battery
Use battery specification CR2025 160mAH
Rated working voltage DC 3V
Operating voltage range DC.2.25V-4.2V
Working current range≤.15mA
Standby current≤3uA
Carrier frequency 37.92KHZ...0.8%
Transmitting distance height ≥ 8m (. axis direction; unobstructed, standard receiving device..)
Directivity emission angle ≤ 30° (no refracting object space, standard receiving device)
Directional emission distance ≥ 6m (no refracting object space, standard receiving device)
Undervoltage launch distance 4m (2.5V axis direction.; unblocked)
Button free height ≤ 3. mm
Button force 250.~350g
Button load life ≥ 200,000 times
Free drop test 76cm (hard floor)/100cm (wood floor)
The number of free drops 6 times (one time per side...nemu-
Vibration test (30min)
Number of scan cycles: 5
High temperature storage test 45°C. (2h) A-waEnns.
Low temperature storage
Constant humidity test-_.25°C2h).
40°C relative humidity 93% (48h)
Relative humidity 45%~75%RH
Atmospheric pressure 86.~106Kpa
Ambient illuminance (used) natural light or fluorescent light 200±5OLX
Ambient temperature
Relative humidity 45%~75% RH
Atmospheric pressure 86~106Kpa
Ambient illuminance (use) natural light or fluorescent light 200 ± 5OLX
Chrome plate material PET with bulge
Plastic material ABS/new material is harmless to human body
Button material: PE PVC carbon film contacts.)
Circuit board material 94HB-. 0..8./mm
Please refer to the code table description on the attached page for the processor model
Packing method: self-adhesive bag
IC packaging method Dip Chip: CD6222B
Remote control emission source IR..(940±50nm)
See the attached picture for the remote control transmitting code table.....
Remote control coding specification NEC coding method
Product size 86*40*6.0mm.
Use battery type lithium manganese dioxide battery
Use battery specification CR2025 160mAH
Rated working voltage DC 3V
Operating voltage range DC.2.25V-4.2V
Working current range≤.15mA
Standby current≤3uA
Carrier frequency 37.92KHZ...0.8%
Transmitting distance height ≥ 8m (. axis direction; unobstructed, standard receiving device..)
Directivity emission angle ≤ 30° (no refracting object space, standard receiving device)
Directional emission distance ≥ 6m (no refracting object space, standard receiving device)
Undervoltage launch distance 4m (2.5V axis direction.; unblocked)
Button free height ≤ 3. mm
Button force 250.~350g
Button load life ≥ 200,000 times
Free drop test 76cm (hard floor)/100cm (wood floor)
The number of free drops 6 times (one time per side...nemu-
Vibration test (30min)
Number of scan cycles: 5
High temperature storage test 45°C. (2h) A-waEnns.
Low temperature storage
Constant humidity test-_.25°C2h).
40°C relative humidity 93% (48h)
|
Control chip
|
UPD6122
|
|
Key
|
3
|
|
Distance
|
8 meters
|
|
Use battery
|
CR2025 160mAH
|
|
Rated working voltage
|
DC 3V
|
|
Operating voltage range
|
DC.2.25V-4.2V
|
|
Working current range
|
15mA
|
|
Standby current
|
3uA
|
|
Carrier frequency
|
37.92KHZ...0.8%
|
|
Directivity emission angle
|
30° (no refracting object space, standard receiving device)
|
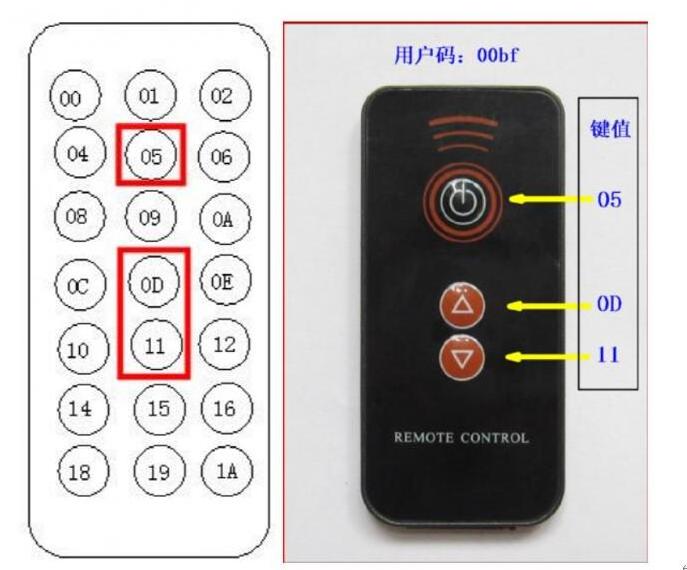
User code: 00BF
The key code is as follows:
The key code is as follows:
Programming information
The main component of the emitting part is an infrared light emitting diode. At present, the infrared light-emitting diodes that are widely used emit infrared wavelengths of about 940mm, and the shape is the same as that of ordinary φ5 light-emitting diodes.
The infrared receiving tube of the receiving part is a kind of photosensitive diode. Infrared light-emitting diodes generally
have two types: round and square. Since the transmitting power of infrared light-emitting diodes is generally small (about 100mW), the signal received by the infrared receiving diode is relatively weak, so a high-gain amplifier circuit must be added. In recent years, most of the infrared receivers have been finished products.
There are roughly two types of packages for the finished infrared receiver: one is shielded by iron sheet; the other is plastic package. There are three pins, namely power supply positive (VDD), power supply negative (GND) and data output (VO or OUT). The pin arrangement of the infrared receiver varies from model to model, please refer to the manufacturer's instructions. The advantage of the finished infrared receiver is that it does not require complicated debugging and shell shielding, and it is very convenient to use like a triode. But pay attention to the carrier frequency of the finished infrared receiver when using it. The commonly used carrier frequency for infrared remote control is 38kHz, which is determined by the 455kHz crystal oscillator used by the transmitter. At the transmitting end, the crystal oscillator should be divided by integer frequency, and the frequency division coefficient is generally 12, so 455kHz÷12≈37.9kHz≈38kHz. There are also some remote control systems that use 36 kHz, 40kHz, 56 kHz, etc., which are determined by the oscillation frequency of the crystal oscillator at the transmitting end.
The characteristic of infrared remote control is that it does not affect the surrounding environment and does not interfere with other electrical equipment. It has been widely used in indoor remote (less than 10 meters) remote control.
Infrared remote control is more and more widely used in production and life.Different infrared remote control chips have different code sending protocols, but they are generally composed of three parts: guide code, system code, and key code.
The guide code tells the receiver to prepare to receive the infrared remote control code. The system code is the identification code, and different remote control chips have different identification codes to avoid mistakes.
Different keys on the remote control have different key codes. The system code and key code are both 16-digit codes, 8-digit positive codes, and 8-digit reverse codes. For example, the system code of SC6122 is FF00, and FF and 00 are mutually inverse codes. Code 1 is EF10 and it is the complement of each other.
The boot code of SC6122 is 9000 microseconds for low level and 4500 microseconds for high level. Of course, the high level cannot be accurate to 9000 microseconds. It is regarded as the normal range between 8000 microseconds and 10000 microseconds. The level between 4000-5000 is regarded as the normal range. The 32-bit code after the boot code (16-bit system code and 16-bit key code) regardless of the high and low levels, the carrier time is 560 microseconds, but the low level continues The time is 1125 microseconds, and the duration of the high level is 2250 microseconds, so the carrier removal time of the low level is about 560 microseconds, and the carrier removal time of the high level is about 1680 microseconds. The low level also has a fluctuation range, in The range between 400-700 is considered normal, and the specific amount can be measured by an oscilloscope. The high level also has a fluctuation range, and the range between 400-2000 is considered normal. The specific amount is also based on experience. Of course, the more the range is Wider, the wider the range of capturing infrared rays, the more accurate. When capturing high and low levels, take an intermediate value of 1120 microseconds between 560 and 1,680. It is considered that less than 1120 microseconds is a low level, and greater than 1120 microseconds. The second is high.
The following program can display the system code and key code on the LCD, press different buttons, the system code will not change, but the key code will be changed.
#include
#define c(x) (x*110592/120000)
sbit Ir_Pin=P3^3;
unsigned char code Led_Tab[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,
0xf8,0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E); //common anode digital display code 0-F.
unsigned char code Led_Sel[]={0xe,0xd,0xb,0x7};
unsigned char Led_Buf[4]; //Display buffer
char Led_Index; //bit selection
unsigned char Ir_Buf[4]; //used to save the decoding result
//============================================== ==============
timer0() interrupt 1 using 1 //digital tube scan
{
TL0=65536-1000;
TH0=(65536-1000)/256; //Timer 0 set about 1000us interrupt once, used for digital tube scanning
P0=0xff;
P2=Led_Sel[Led_Index]; //bit selection
P0=Led_Tab[Led_Buf[Led_Index]]; //Segment selection
if(++Led_Index>3) Led_Index=0; //Four scans are completed, to the first digital tube
}
//============================================== ==============
unsigned int Ir_Get_Low()
{
TL1=0;
TH1=0;
TR1=1;
while(!Ir_Pin && (TH1&0x80)==0);
TR1=0;
return TH1*256+TL1;
}
//============================================== =============
unsigned int Ir_Get_High()
{
TL1=0;
TH1=0;
TR1=1;
while(Ir_Pin && (TH1&0x80)==0);
TR1=0;
return TH1*256+TL1;
}
//============================================== ==============
main()
{
unsigned int temp;
char i,j;
Led_Index=1;
TMOD=0x11;
TL0=65536-1000;
TH0=(65536-1000)/256; //Timer 0 set about 1000us interrupt once, used for digital tube scanning
EA=1;
ET0=1;
TR0=1;
Led_Buf[0]=0;
Led_Buf[1]=0;
Led_Buf[2]=0;
Led_Buf[3]=0; //Set the display area to 0
do
{
restart:
while(Ir_Pin);
temp=Ir_Get_Low();
if(tempc(9500)) continue;//lead pulse low level 9000
temp=Ir_Get_High();
if(tempc(5000)) continue;//lead pulse high level 4500
for(i=0;i<4;i++) //4 bytes
for(j=0;j<8;j++) //8 bits per byte
{
temp=Ir_Get_Low();
if(tempc(800)) goto restart;
temp=Ir_Get_High();
if(tempc(2000)) goto restart;
Ir_Buf[i]>>=1;
if(temp>c(1120)) Ir_Buf[i]|=0x80;
}
Led_Buf[0]=Ir_Buf[2]&0xf;
Led_Buf[1]=(Ir_Buf[2]/16)&0xf;
Led_Buf[2]=Ir_Buf[3]&0xf;
Led_Buf[3]=(Ir_Buf[3]/16)&0xf; //Display the result
}
while(1);
}
The infrared receiving tube of the receiving part is a kind of photosensitive diode. Infrared light-emitting diodes generally
have two types: round and square. Since the transmitting power of infrared light-emitting diodes is generally small (about 100mW), the signal received by the infrared receiving diode is relatively weak, so a high-gain amplifier circuit must be added. In recent years, most of the infrared receivers have been finished products.
There are roughly two types of packages for the finished infrared receiver: one is shielded by iron sheet; the other is plastic package. There are three pins, namely power supply positive (VDD), power supply negative (GND) and data output (VO or OUT). The pin arrangement of the infrared receiver varies from model to model, please refer to the manufacturer's instructions. The advantage of the finished infrared receiver is that it does not require complicated debugging and shell shielding, and it is very convenient to use like a triode. But pay attention to the carrier frequency of the finished infrared receiver when using it. The commonly used carrier frequency for infrared remote control is 38kHz, which is determined by the 455kHz crystal oscillator used by the transmitter. At the transmitting end, the crystal oscillator should be divided by integer frequency, and the frequency division coefficient is generally 12, so 455kHz÷12≈37.9kHz≈38kHz. There are also some remote control systems that use 36 kHz, 40kHz, 56 kHz, etc., which are determined by the oscillation frequency of the crystal oscillator at the transmitting end.
The characteristic of infrared remote control is that it does not affect the surrounding environment and does not interfere with other electrical equipment. It has been widely used in indoor remote (less than 10 meters) remote control.
Infrared remote control is more and more widely used in production and life.Different infrared remote control chips have different code sending protocols, but they are generally composed of three parts: guide code, system code, and key code.
The guide code tells the receiver to prepare to receive the infrared remote control code. The system code is the identification code, and different remote control chips have different identification codes to avoid mistakes.
Different keys on the remote control have different key codes. The system code and key code are both 16-digit codes, 8-digit positive codes, and 8-digit reverse codes. For example, the system code of SC6122 is FF00, and FF and 00 are mutually inverse codes. Code 1 is EF10 and it is the complement of each other.
The boot code of SC6122 is 9000 microseconds for low level and 4500 microseconds for high level. Of course, the high level cannot be accurate to 9000 microseconds. It is regarded as the normal range between 8000 microseconds and 10000 microseconds. The level between 4000-5000 is regarded as the normal range. The 32-bit code after the boot code (16-bit system code and 16-bit key code) regardless of the high and low levels, the carrier time is 560 microseconds, but the low level continues The time is 1125 microseconds, and the duration of the high level is 2250 microseconds, so the carrier removal time of the low level is about 560 microseconds, and the carrier removal time of the high level is about 1680 microseconds. The low level also has a fluctuation range, in The range between 400-700 is considered normal, and the specific amount can be measured by an oscilloscope. The high level also has a fluctuation range, and the range between 400-2000 is considered normal. The specific amount is also based on experience. Of course, the more the range is Wider, the wider the range of capturing infrared rays, the more accurate. When capturing high and low levels, take an intermediate value of 1120 microseconds between 560 and 1,680. It is considered that less than 1120 microseconds is a low level, and greater than 1120 microseconds. The second is high.
The following program can display the system code and key code on the LCD, press different buttons, the system code will not change, but the key code will be changed.
#include
#define c(x) (x*110592/120000)
sbit Ir_Pin=P3^3;
unsigned char code Led_Tab[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,
0xf8,0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E); //common anode digital display code 0-F.
unsigned char code Led_Sel[]={0xe,0xd,0xb,0x7};
unsigned char Led_Buf[4]; //Display buffer
char Led_Index; //bit selection
unsigned char Ir_Buf[4]; //used to save the decoding result
//============================================== ==============
timer0() interrupt 1 using 1 //digital tube scan
{
TL0=65536-1000;
TH0=(65536-1000)/256; //Timer 0 set about 1000us interrupt once, used for digital tube scanning
P0=0xff;
P2=Led_Sel[Led_Index]; //bit selection
P0=Led_Tab[Led_Buf[Led_Index]]; //Segment selection
if(++Led_Index>3) Led_Index=0; //Four scans are completed, to the first digital tube
}
//============================================== ==============
unsigned int Ir_Get_Low()
{
TL1=0;
TH1=0;
TR1=1;
while(!Ir_Pin && (TH1&0x80)==0);
TR1=0;
return TH1*256+TL1;
}
//============================================== =============
unsigned int Ir_Get_High()
{
TL1=0;
TH1=0;
TR1=1;
while(Ir_Pin && (TH1&0x80)==0);
TR1=0;
return TH1*256+TL1;
}
//============================================== ==============
main()
{
unsigned int temp;
char i,j;
Led_Index=1;
TMOD=0x11;
TL0=65536-1000;
TH0=(65536-1000)/256; //Timer 0 set about 1000us interrupt once, used for digital tube scanning
EA=1;
ET0=1;
TR0=1;
Led_Buf[0]=0;
Led_Buf[1]=0;
Led_Buf[2]=0;
Led_Buf[3]=0; //Set the display area to 0
do
{
restart:
while(Ir_Pin);
temp=Ir_Get_Low();
if(tempc(9500)) continue;//lead pulse low level 9000
temp=Ir_Get_High();
if(tempc(5000)) continue;//lead pulse high level 4500
for(i=0;i<4;i++) //4 bytes
for(j=0;j<8;j++) //8 bits per byte
{
temp=Ir_Get_Low();
if(tempc(800)) goto restart;
temp=Ir_Get_High();
if(tempc(2000)) goto restart;
Ir_Buf[i]>>=1;
if(temp>c(1120)) Ir_Buf[i]|=0x80;
}
Led_Buf[0]=Ir_Buf[2]&0xf;
Led_Buf[1]=(Ir_Buf[2]/16)&0xf;
Led_Buf[2]=Ir_Buf[3]&0xf;
Led_Buf[3]=(Ir_Buf[3]/16)&0xf; //Display the result
}
while(1);
}


Packing & Delivery

To better ensure the safety of your goods, professional, environmentally friendly, convenient and efficient packaging services will be provided.









Hot Searches
