- Product Details
- {{item.text}}
Quick Details
-
Warranty:
-
1year
-
Place of Origin:
-
Henan, China
-
Brand Name:
-
TINSMITH
-
Model Number:
-
TD-30-40-PRO-100
-
Torque:
-
3.3NM
-
Product Name:
-
CANopen Modular robotic Arm Robot Joint Servo Motor with Harmonic
-
Harmonic reducer-ratio:
-
100
-
Start-stop peak torque:
-
4.8NM
-
Rated torque:
-
3.3NM
-
Instantaneous maximum torque:
-
9NM
-
Peak speed of output:
-
60RPM
-
Motor power:
-
36W
-
Supply voltage(V):
-
18-52V(±10%)
-
Rated current:
-
1.1A
-
Peak current:
-
3A
Quick Details
-
Speed(RPM):
-
45RPM
-
Continuous Current(A):
-
1A
-
Efficiency:
-
IE 2
-
Warranty:
-
1year
-
Place of Origin:
-
Henan, China
-
Brand Name:
-
TINSMITH
-
Model Number:
-
TD-30-40-PRO-100
-
Torque:
-
3.3NM
-
Product Name:
-
CANopen Modular robotic Arm Robot Joint Servo Motor with Harmonic
-
Harmonic reducer-ratio:
-
100
-
Start-stop peak torque:
-
4.8NM
-
Rated torque:
-
3.3NM
-
Instantaneous maximum torque:
-
9NM
-
Peak speed of output:
-
60RPM
-
Motor power:
-
36W
-
Supply voltage(V):
-
18-52V(±10%)
-
Rated current:
-
1.1A
-
Peak current:
-
3A
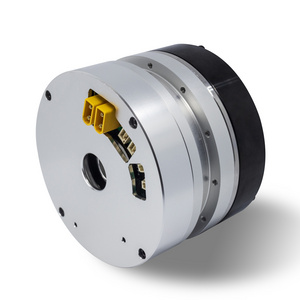
Mini CANopen Can bus Modular robotic Arm Robot Joint Servo Motor with Harmonic Gearbox Drive

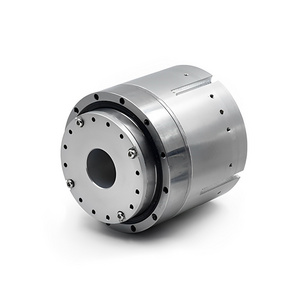
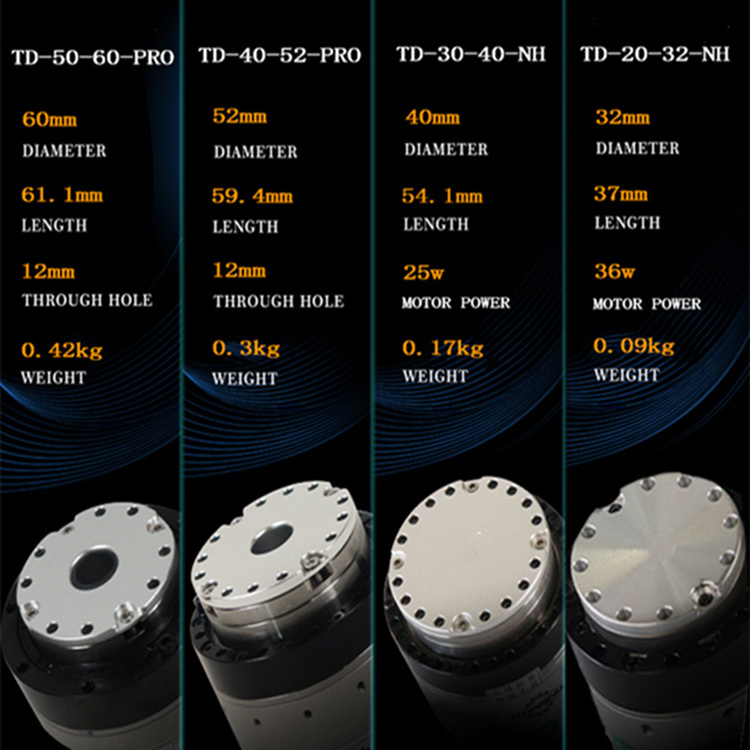
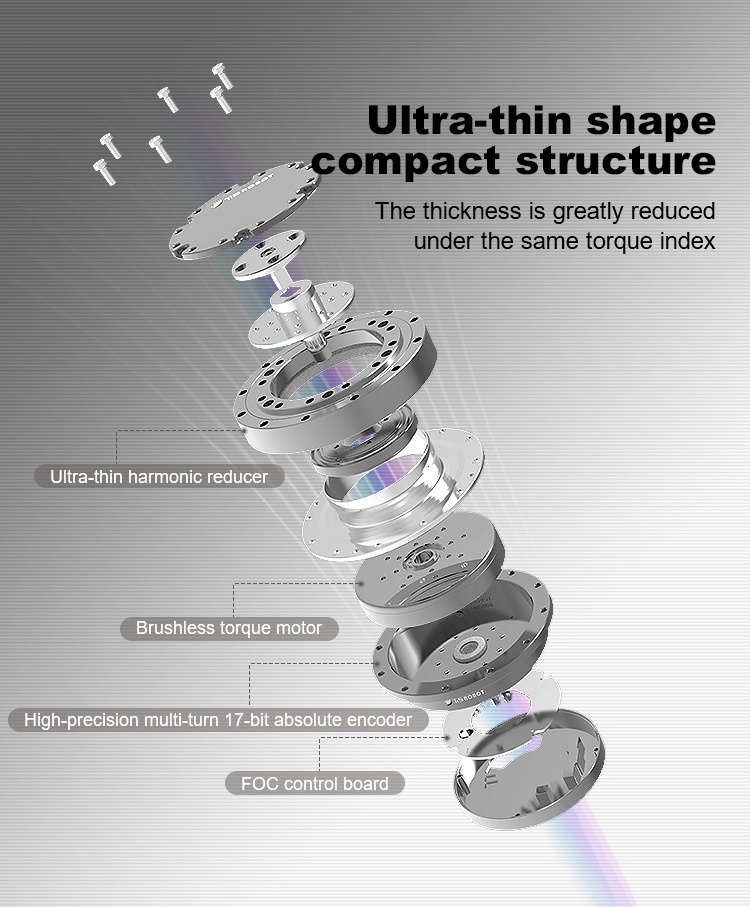
The outer diameter of this series of joint modules ranges from 40mm to 170mm, with exquisite design and compact structure. The small size includes FOC control board, high-precision multi-turn absolute encoder, frameless torque motor, precision harmonic reducer and other main components , saving customers the labor and time cost of selecting, designing, purchasing, and assembling hundreds of mechanical and electronic components.
The smallest size is only 40mm, and the weight is 0.13kg

The compact size of this product includes FOC control board, high-precision multi-turn absolute encoder, frameless torque motor, precision harmonic reducer and other main components
Low-power encoder with only 46 μA standby current
| Model | TD-30-40-PRO-XX | TD-30-40-PRO-XXB |
| Ratio | 50/100 | 50/100 |
| Start-stop peak torque (N.m) | 3.3/4.8 | 3.3/4.8 |
| Instantaneous maximum torque (N.m) | 6.6/9 | 6.6/9 |
| Rated torque (N.m) | 2.3/3.3 | 2.3/3.3 |
| Output Peak Speed (RPM) | 120/60 | 120/60 |
| Rated speed (RPM) | 90/45 | 90/45 |
| Motor power (W) | 36 | 36 |
| Supply voltage (V) | 24-48 | 24-48 |
| Rated current (A) | 1 | 1 |
| Peak current(A) | 3 | 3 |
| Encoder Resolution (Bit) | 17 | 17 |
| Backlash (arcsec) | 40 | 40 |
| communication bus | CAN | CAN |
| Length(mm) | 53.9 | 67.5 |
| Weight(kg) | 0.16 | 0.22 |
This kind of robot joint modules can be used in robots, humanoid robots, and exoskeletons, helping us to quickly build robot arms and greatly shorten the development cycle.