WAVEGO, 12-DOF Bionic Dog-Like Robot, Open Source For ESP32 And PI4B, Facial Recognition, Color Tracking, Motion Detection
HIGH-DOF BIONIC QUADRUPED ROBOT
Powered by ESP32 sub controller & Raspberry Pi 4B host controller
The
WAVEGO
is a high-DOF bionic dog-like robot which features 2.3kg.cm large torque servos, reliable structure, and flexible motion, incorporating devices like front camera, 9-axes motion tracker, RGB indicator, etc., together with open source multi-platform Web application. It uses the ESP32 as sub controller for connecting rod inverse solving and gait generation, sharing calculating task for the host controller, an additional Raspberry Pi can be attached as the host controller for high-level decision operating.
Product Features
Overall 12-DOF, multi connecting rods leg design, increasing the servo effective torque
A real time operating system is used as sub controller for connecting rod inverse solving and gait generation, sharing calculating task for the host controller and improving the gait solving efficiency
Ultra compact structure design, allows using on the table, aluminum alloy + nylon structure materials, ensuring strength while keeping it light weight
Additional Raspberry Pi can beattached as the host controller to enable OpenCV high-level functions, demo codes including facial recognition, motion detection, color tracking, and more. Reserved extension interface for secondary development, along with user manual and secondary development documents.
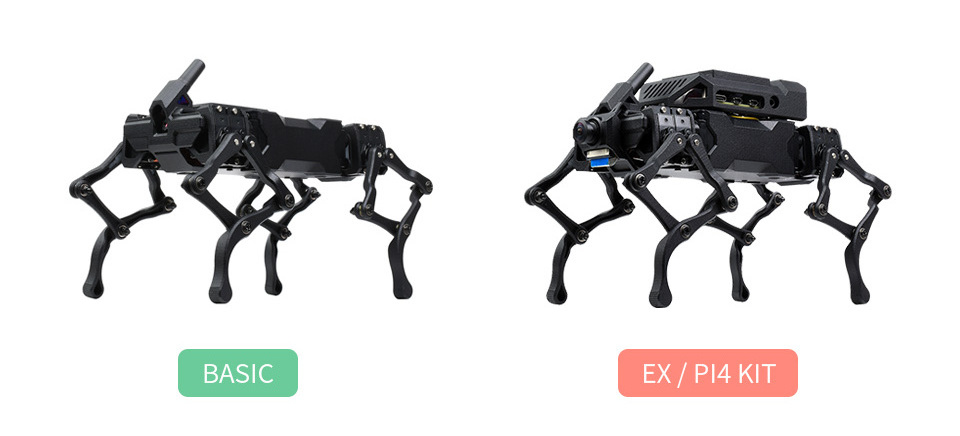
Selection Guide
WAVEGO BASIC
WAVEGO EX
WAVEGO PI4 KIT
Basic pack
√
√
√
Extension pack
√
√
PI4B-4GB add-on
√
Pre-assemble option
√
√
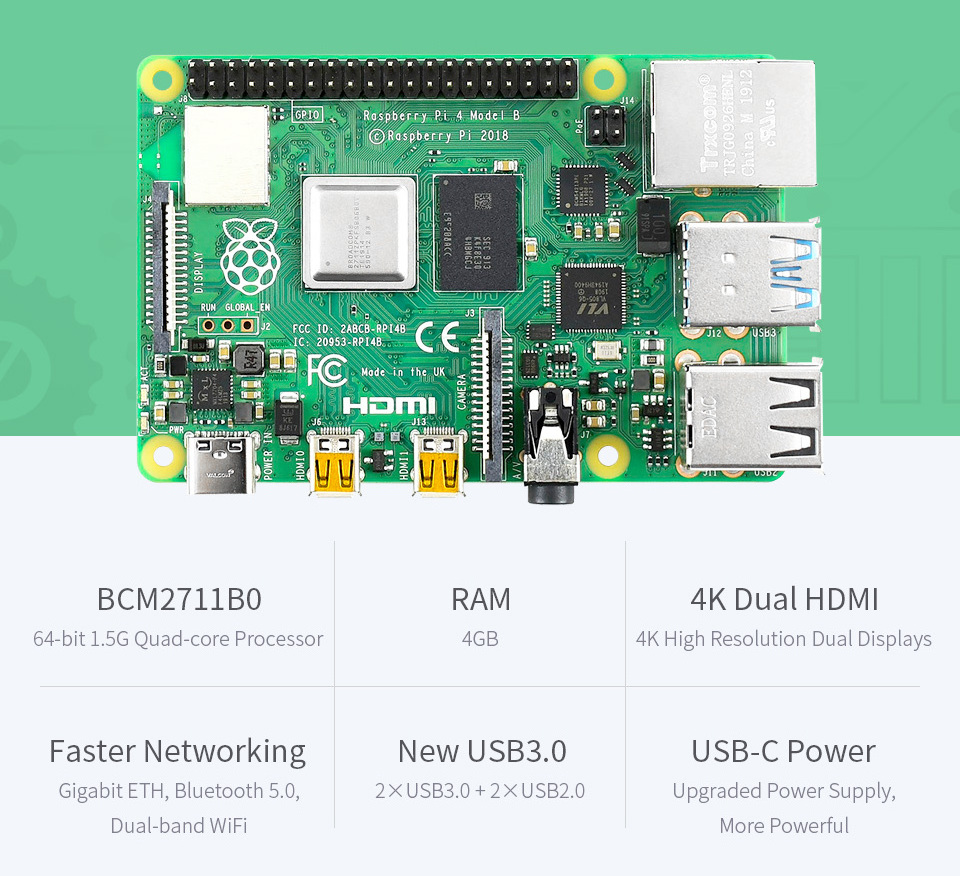
Raspberry Pi 4 Controller
More Powerful Processor, Richer Multi-Media Capability, Faster Networking
Developing High-Level Functions
An Raspberry Pi Can Be Attached As Host Controller To Communicate With The Sub Controller Via UART,
The ESP32 Sub Controller Will Share Lots Of Calculating Task Like Connecting Rod Inverse Solving And Gait Generation, Retaining More Raspberry Pi Performance For Developing High-Level Functions
Dimensions
Specifications
GENERAL
Product name
WAVEGO high-DOF bionic quadruped robot
Stand up
length 218mm, width 116mm, height 152mm
Lie down
length 228mm, width 116mm, height 127mm
Overall weight
BASIC: 465g (with batteries)
EX / PI4 KIT: 554g (with batteries)
DOF
12 overall, 3 per single leg
OPERATING SYSTEM
Demo code
FreeRTOS + Raspberry Pi OS
MOTION PERFORMANCE
Available gait
shake hands | stand up | crouch slowly | diagonal gait | jump | self-balancing
Motion extension
Providing motion programming example, including flexible Bezier curve speed motion function
Max load
BASIC: 300g
EX / PI4 KIT: 200g
SERVO INFO
Dimensions
23.2 x12.1 x25.25 mm
Weight
13.0 ± 1g
Operating voltage
6V
Idle speed
0.1sec/60° (100RPM)
Stalling torque
2.3kg.cm (31.99oz.in)
Rated load
0.7kg.cm
Rated current
350mA
Control method
Pulse width modification
Control system type
Digital comparator
VISUAL FUNCTION
FreeRTOS demo
web-based real time video streaming
Raspberry Pi OS demo
real time video streaming | facial recognition | color tracking | moving object detection
Note: all the demo codes are open sourced, the Raspberry Pi OS demo is based on open source projects flask-streaming and OpenCV
PROCESSOR AND MEMORY
ESP32 sub controller
Processor: Xtensa LX6 dual-core processor @240MHz
SRAM: 520KB+8MB
Flash: 448KB+4MB
OTHERS
WiFi standard
802.11b/g/n
BLE standard
BLE 4.2, including traditional BLE (BR/EDR) and BLE low energy (BLE)
External port
2*5P multi-function extension port (host controller communication, power supply selection, assembly mode selection, etc.)
Protection: over charge/discharge protection, over current protection, short circuit protection, reverse proof, equalizing charge, stable and safe operating
Output voltage: provides 5V output for other host controller