- Product Details
- {{item.text}}
Quick Details
-
Warranty:
-
1 year
-
Place of Origin:
-
Henan, China
-
Brand Name:
-
TINSMITH
-
Model Number:
-
M4215E14B80
-
Torque:
-
10NM
-
Product name:
-
Modular robotic Arm Robot Joint Servo Motor with harmonic gearbox
-
Harmonic reducer-ratio:
-
14-50
-
Motor rated voltage:
-
36VDC±10%
-
Motor rated current:
-
2.2A
-
Output torque after deceleration:
-
10NM
-
Speed range after deceleration:
-
0~30RPM
-
Design life:
-
8500hours
-
Motor Power:
-
50W
-
Motor speed:
-
1500rpm
-
Motor Torque:
-
0.5NM
Quick Details
-
Speed(RPM):
-
0~30RPM
-
Continuous Current(A):
-
2.2A
-
Efficiency:
-
IE 2
-
Warranty:
-
1 year
-
Place of Origin:
-
Henan, China
-
Brand Name:
-
TINSMITH
-
Model Number:
-
M4215E14B80
-
Torque:
-
10NM
-
Product name:
-
Modular robotic Arm Robot Joint Servo Motor with harmonic gearbox
-
Harmonic reducer-ratio:
-
14-50
-
Motor rated voltage:
-
36VDC±10%
-
Motor rated current:
-
2.2A
-
Output torque after deceleration:
-
10NM
-
Speed range after deceleration:
-
0~30RPM
-
Design life:
-
8500hours
-
Motor Power:
-
50W
-
Motor speed:
-
1500rpm
-
Motor Torque:
-
0.5NM
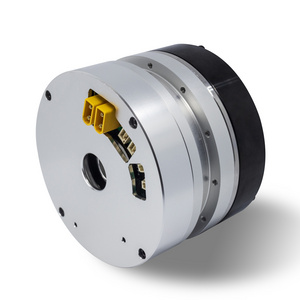
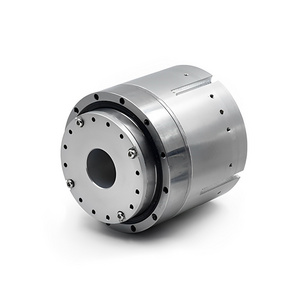
Can bus Modular robotic Arm Robot Joint Servo Motor with harmonic gearbox drive
OD 80mm Small size robot joint actuator servo motor is mainly used for Robot Arm, integrated harmonic reducer, encoder, dc motor and driver. The robot joint servo motor could be used in robot arm joint directly, help build robot joints quickly.

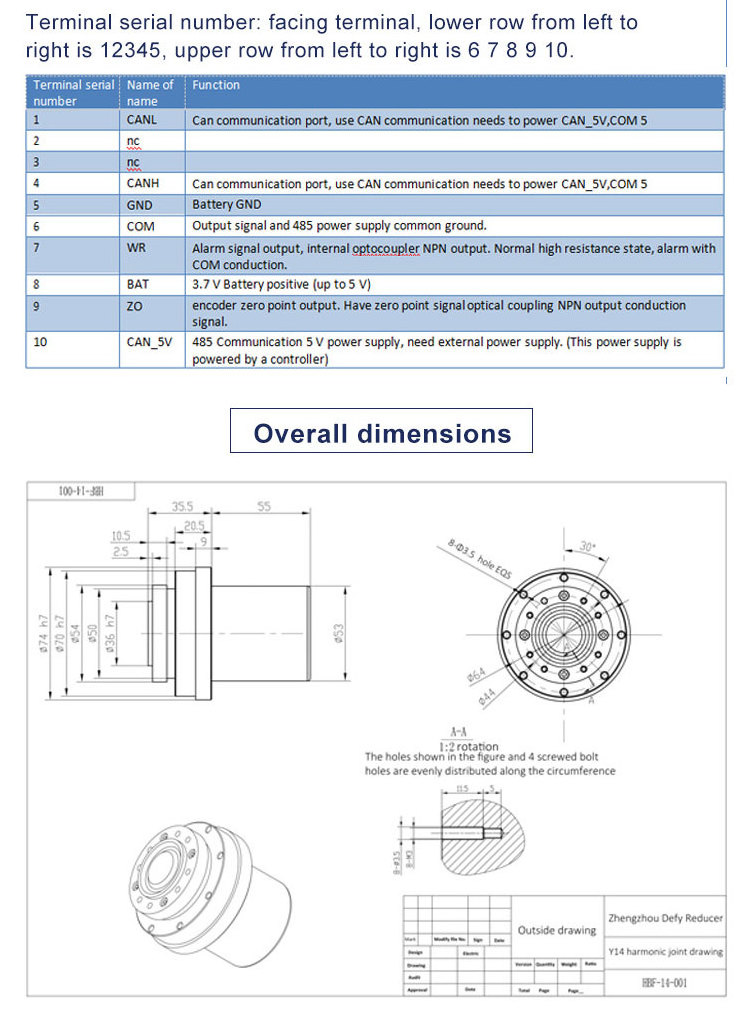
1. Isolation CAN communication (EasyCan protocol, simple, quick start, rate 1M). Support contour position mode, and, periodic synchronization mode.
2. With 17(50/80/100) harmonic reducer
3. 24-bit multi-loop absolute encoder (single-loop 15 bits + multi-loop 9 bits)(battery required).
4. Multistage DD motor structure, large torque output.
5. Integrated servo, simplified wiring, ultra-small volume.
6. Low noise, low vibration, high speed positioning, high reliability.
7. FOC field oriented vector control, support position / speed closed loop.
8. can work at zero hysteresis given pulse state, following zero hysteresis.
9. CAN upper computer is provided to monitor motor status and modify parameters.
10. position mode, support pulse + direction signal, encoder follow
11. Speed mode, support PWM duty cycle signal speed regulation
12. With blocking, overcurrent protection, overvoltage protection.

Parameter of M Series Robot Joint Motor Actuator
| Parameter | M4215E14B50 | M4215E14B80 | |
| Overall parameter | Motor rated voltage | 36VDC±10% | 36VDC±10% |
| Motor rated current | 2.2A | 2.2A | |
| Output torque after deceleration | 9NM | 14NM | |
| Weight | 1KG | 1KG | |
| Speed range after deceleration | 0~30RPM | 0~20RPM | |
| Reducer parameter | Reduction ratio | 50 | 80 |
| Rated torque | 7NM | 10NM | |
| Peak start-stop torque | 23NM | 30NM | |
| Allowable maximum value of average load torque | 9NM | 14NM | |
| Momentary allowable maximum torque | 46NM | 61NM | |
| Backlash | < 20arc seconds | ||
| Design life | 8500hour | 8500hour | |
| Motor parameter | Torque | 0.5NM | 0.5NM |
| Rated speed | 1500RPM | 1500RPM | |
| Maximum rotational speed | 2000RPM | 2000RPM | |
| Power | 50W | 50W | |
| Resistance | 2.65 | 2.65 | |
| Inductance | 1.1mh | 1.1mh | |
| Rotary inertia | 0.9139x10-4 KG/M 2 | 0.9139x10-4 KG/M 2 | |
| Feedback signal | Multi-loop absolute encoder (single-loop 15 bit multi-loop 9 bit) | ||
| Cooling mode | Natural cooling | ||
| Position Control Mode | Maximum input pulse frequency | 500KHz | |
| Pulse instruction mode | Pulse + direction, A phase +B phase | ||
| Electronic gear ratio | Set up ~65535 to 65535 | ||
| Location sampling frequency | 2KHZ | ||
| Protection function | Overcurrent alarm | ||
| Communication interface | Easycan (CAN communication, rate 1 M) | ||
| Environment | Ambient temperature | 0~40° | |
| Max. permissible temperature of motor | 85° | ||
| Humidity | 5~95% | ||
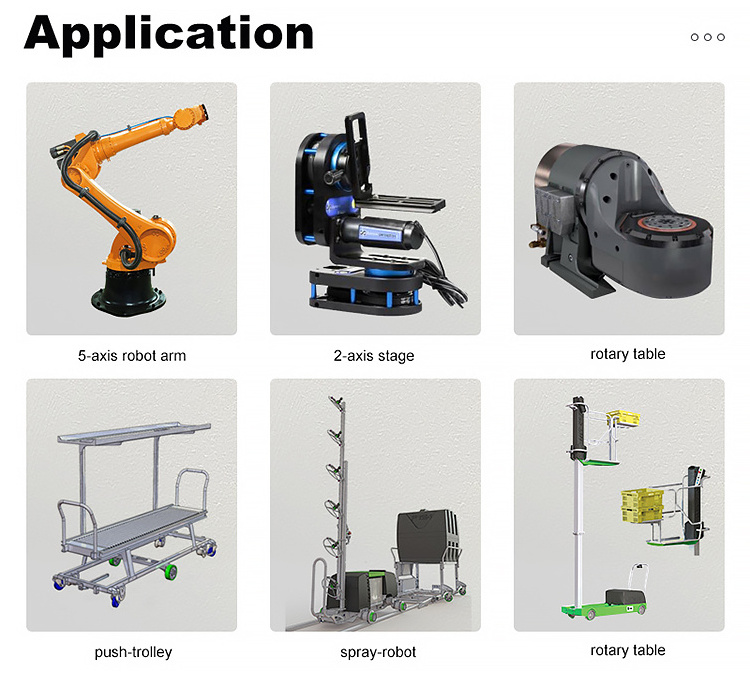
With modular design, compact joint module, its weight, size, installation mode, appearance lamp compared with the traditional products have done a considerable optimization, mainly used in cooperative robotand and light robot, can meet the miniaturization, lightweight, modular needs to a large extent.Can also be widely used in industrial robots, service robots, industrial automation equipment, lathe equipment and etc.
1. We accept sample order of robot joint motor ;
2. Sample order of robot motor delivery time is within 10 days, mass quantity order lead time is 7-15 days;
3. We can accept payment via paypal, T/T and L/C;
4.Quality assurance of our robot motor is 1 year, and we can provide you professional technical support;
5. We provide free software wand training how to use the products. Engineers are available for technical support.